まず、目的としては、最近購入したNEC PC98UX(Intel 286 CPU)のクロスプラットホーム環境として利用可能な状態で導入することです。
今回のために選定したエミュレータは、”T98”です。最新版として、”T98-NEXT”もありますが、こちらは、PC-9821(Intel386)用のエミュレータとのことだったので、これではなく、あえて開発も終了した”T98”を選びました。(もちろんこちらが今回の要件にあった”PC-9801”用エミュレータだと思われたからです。)
これをWindows端末に ダウンロードさせていただきました。インストールは、インストーラをWクリックして完了!というわけではなく、ほぼほぼ手動となります。
なお、動作させることになるWindows端末のスペックとしては、
・i386系32BitWindows →WindowsXP Prof.(32bit) +SP3
・PentiumII300MHz以上 →PentiumM(1.3GHz)
・Memory32MB以上 →1GB
・DirectX5
・3モードフロッピーディスクドライブ(1.25MBのディスケットが使用可能)
ほかに必要なものとして、NEC版MS-DOSのインストールメディア(マスターディスケットをコピーしたバックアップ用メディアを作成のこと。こちらを本手順では使用します。)
その手順を以下に記します。
1.T98のオフィシャルサイトからダウンロードした圧縮ファイル(t98_027.lzh)を任意の場所に解凍します。
2.解凍したフォルダの中から、”T98.EXE”ファイルを見つけ、そのままWクリックして起動させます。
これは、手順的には、実行した端末の環境がエミュレータにあっているかをチェックするためとのこと。
適合していれば、98実機を電源ONした時のように、搭載メモリチェックのカウント表示[MEMORY 640KB + 1024KB]がされたのち、画面に何も表示されず「ピー」と音が鳴ります。
※” 「ピー」と音が鳴る ”というか、鳴り続けてとまらないので、[ALT]+[F4]を押して停止させることを実行する前に覚えておきましょ
※また、(この音を鳴らすせい?か、)サウンドカードが利用可能な端末でないとNGとなります。NGとなった場合は、T98.exeファイルのあるフォルダ内にログファイル(LOG.TXT)が生成されているので、そのファイル内容を確認するとよいでしょう。(”WNASPI32.DLLがありません”が出力されているけど、現段階では無視します)
3.前手順2.のチェック結果がOKであれば、今後作業のしやすい任意のフォルダに、エミュレータ実行に必要なファイル”T98.EXE”および” T98.INI”をコピーし、さらにそのサブフォルダとして”BMP”と”RSC”を作成します。
補足)別途、本手順に必要なフリーのツールプログラム”dispell”や”RUNT98 ”をそれぞれのサイトからダウンロードし、同端末にインストールする。(これらは、T98のフォルダ配下に置いておくとよい?)
4.(ここからはいったん、T98から離れて、)エミュレータにインストールするMS-DOSのインストールイメージを作成していきます。
MS-DOSのインストールファイルを手元に用意し、これらのバックアップメディアを作成します。(MS-DOS3.3Dだと、フロッピー3枚となります。バックアップメディアの作成は、PC-98のDOSメニューから作成すればよいです)
5.バックアップメディアは、ライトプロテクトをはずしておきます。この状態で、Windows端末にて、ダウンロードして入手した”DISPELL”を使用して、バックアップメディアから ”EPSONチェック ”をはずします。(バックアップメディアに直接変更を加えるので、MS-DOSのマスターインストールメディアは使わないように)
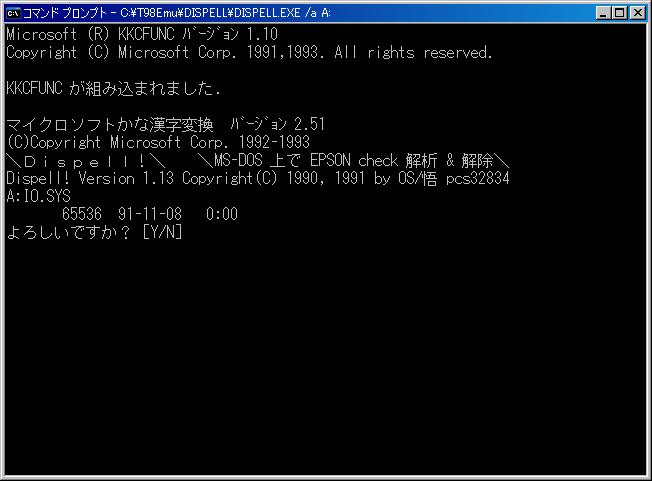
> C:\T98Emu\DISPELL\DISPELL.EXE /a A:
※上記の例だと、”A:”がMS-DOSのインストールメディアを入れるFDDのドライブレターをあらわします。
補足)”EPSONチェック”とは、当時NECがエプソンの98互換機に対抗して、NEC純正品を使わせないようにした対抗措置のようです。
参考)ちなみに、 EPSONチェック がかかっているメディアは1枚だけのようでした。
6.このEPSONチェックが外れたMS-DOSインストールメディア(=バックアップメディア)をT98エミュレータで利用可能にするため、フロッピーディスクイメージを作成します。作成するに当たっては、RUNT98.exeを使用します。
※このとき、バックアップメディアすべてに対してライトプロテクトを有効にしておくこと。
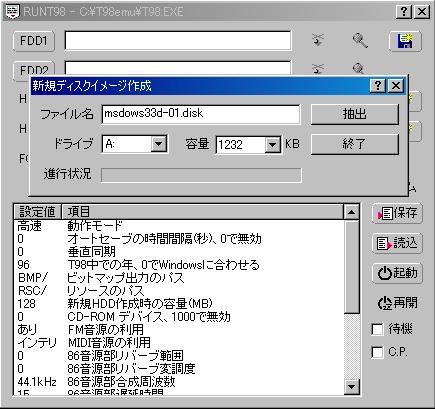
7. RUNT98.exe を起動後、下図の画面中(親ウインドウにて)「FDD1]をクリックして表示される、「新規ディスクイメージ作成」ウィンドウにて、MSDOSインストールメディアのバックアップディスケットを、Windows端末のフロッピーディスクドライブに挿入後、ファイル名(下図と異なるが、あとあとの手順から、”半角8文字.拡張子”としておいたほうがよい)、ドライブ(Windows端末におけるFDDドライブ)、容量=”1232”を選択の上、「抽出」ボタンをクリックして、イメージファイルを作成する。
8.作成が完了したら、T98フォルダ内に(ファイル名で指定した)イメージファイルが枚数分生成されていることを確認する。
注)ここで、T98フォルダ内でなく別のフォルダに出力されていたら、後々の手順を考えて、T98フォルダへ移動させておくことを推奨。
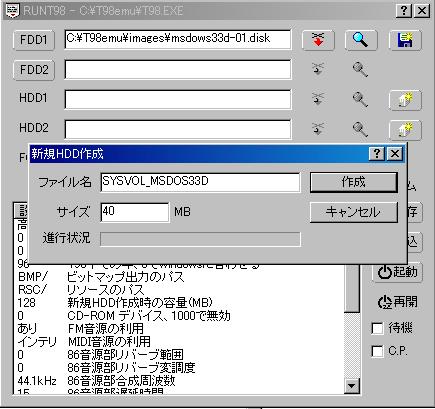
9.RUNT98の画面にて、「FDD1]の欄に前手順で作成した(T98フォルダ内の)MSDOSインストールディスク#1のイメージファイル名を入力(T98フォルダ内であれば、パスの記述は不要)し、さらに「HDD1」には[新規HDD作成]アイコンをクリックして表示されるダイアログボックスにて、任意のファイル名とHDD容量(開発ターゲットの98の容量にあわせる)を入力の上、「作成」をクリックする。
9.下図のように、「FDD1」および「HDD1」の欄に入力後、「起動」をクリックする。
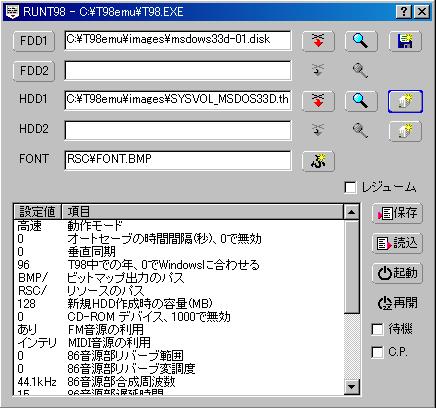
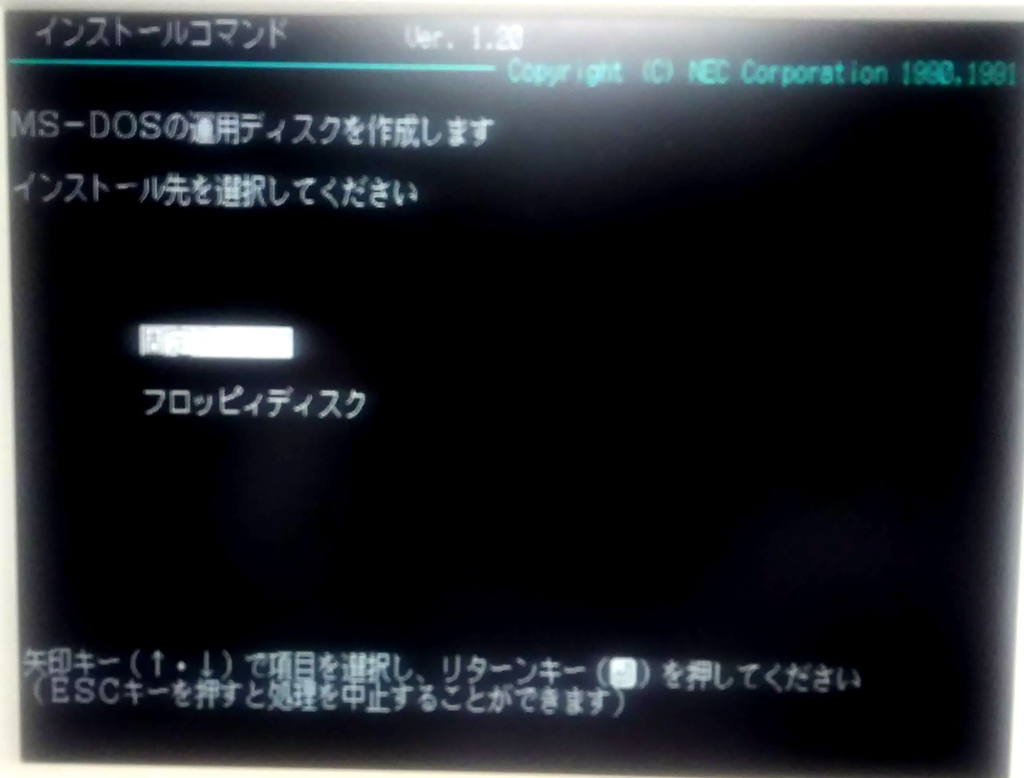
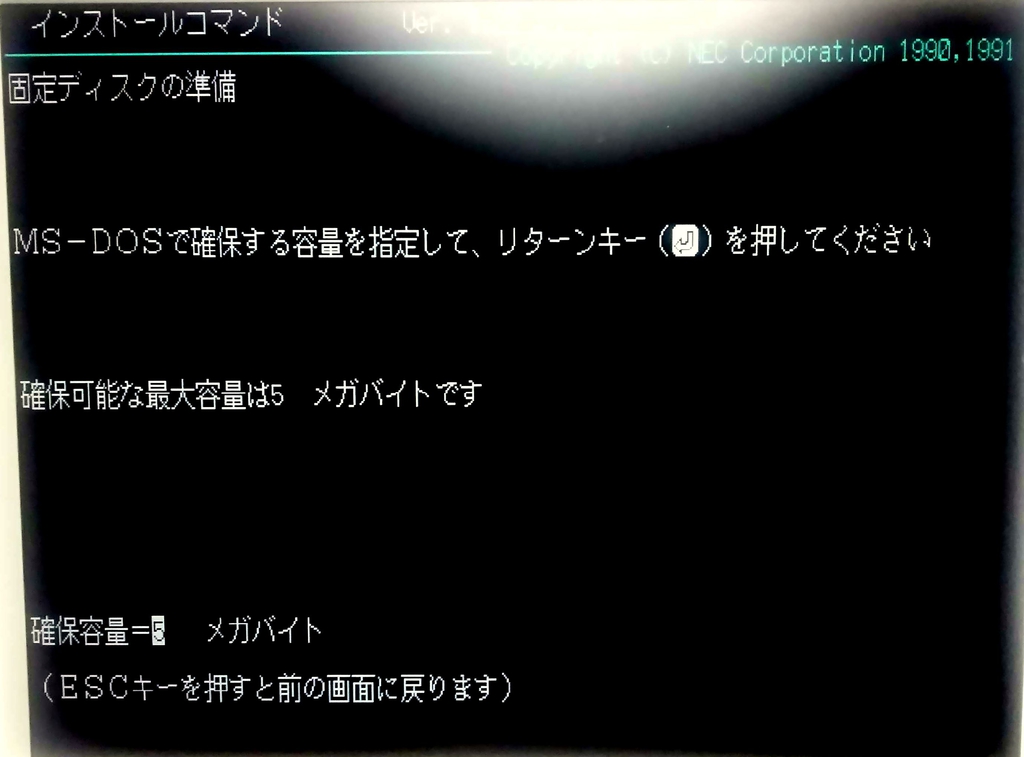
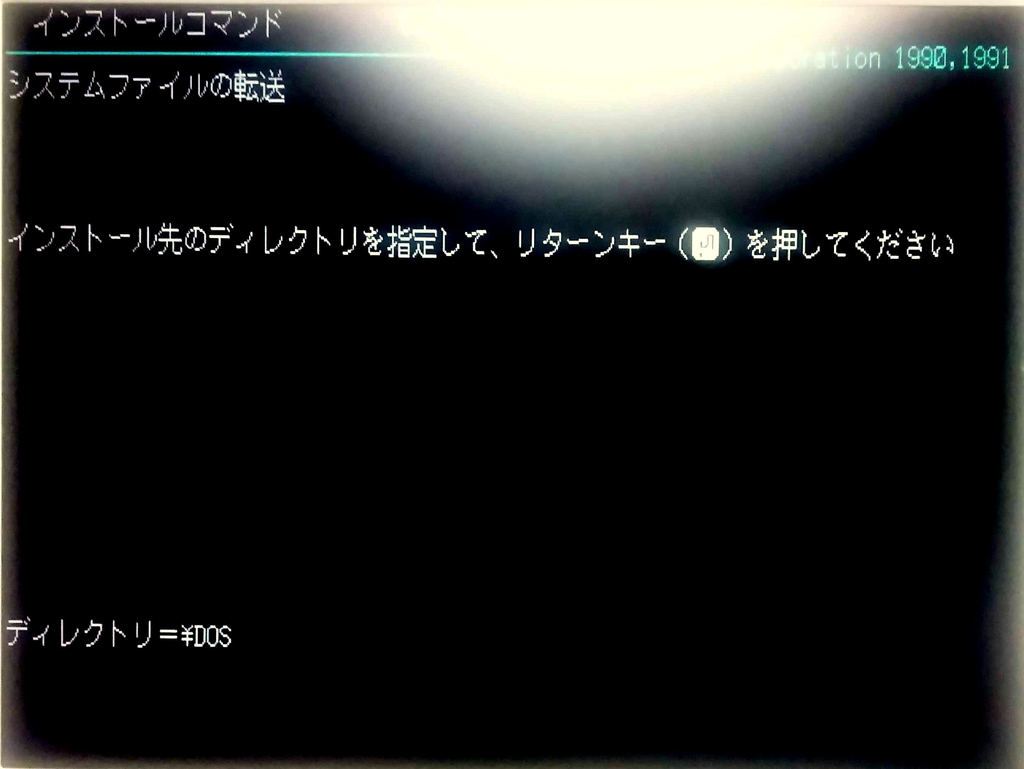
10.エミュレータが起動して、MSDOSのインストール画面が表示されるので、手順に従い操作する。(MSDOSのインストール手順は、「MS-DOS 3.3Dのインストール」を参照)
11.2枚目のメディアが要求されたら、「F11」キーを入力する。すると画面下端にコマンドメニューが表示されるので、「F9」キー(=TCNS)を押す。
12.”TCNS(=T98標準コンソール)”という小さなコンソール画面が表示されるので、その中で書きコマンドを実行する。
>DISK FDD0 <2枚目のイメージファイル名>
補足)”DISK”だけを実行すると、現在マウント中のディスクイメージが一覧表示される。(また、”MAN”コマンドで、使用可能コマンド一覧が表示される)
13.前手順のコンソール画面から、”EXIT”コマンドを実行してクローズ後、インストール画面に戻り、任意のキーを押して、2枚目のイメージファイルを読み込ませる。
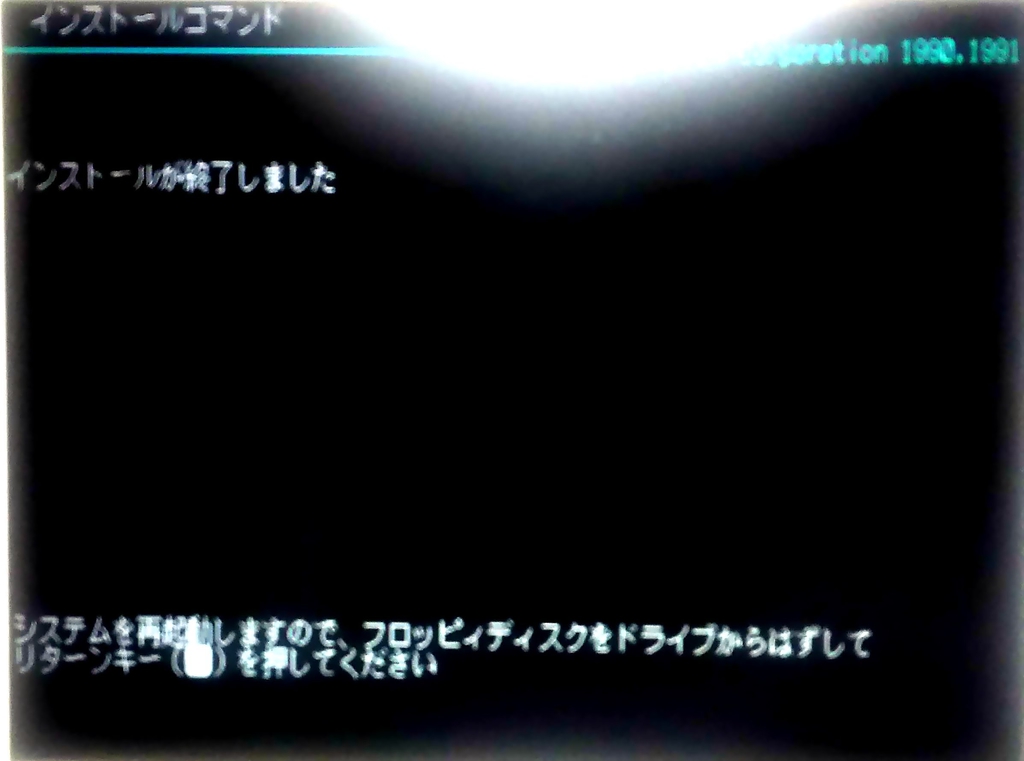
14.すべてのインストールメディアを読み込ませて、インストール手順が終了したら、再度CLIコンソール画面を開き、今度はイメージファイル名を未入力の状態にして(>DISK FDD0 )実行して、メディアを未挿入状態にして、エミュレータを起動させる。
15.MS-DOSのメニュー画面が表示され、MS-DOSの操作が一通りできることを確認する。
以上